In the previous post on image-sources for room modeling, we made the observations that
- There exist a unique path from each image-source coordinate that can be back-traced to a receiver
- The distance and direction between image-source coordinate and listener are equal sum total of the back-traced ray lengths and the final leg of the back-traced path respectively.
- Image-source coordinates in 2D orthotopes has one-to-one mapping to integer lattice points
- The number of image-sources with respect to reflection order
and dimension
is
For large 








The exact solution is known and given by 
Unfortunately, mapping our image-source density problem to the Gauss circle problem introduces many unsatisfactory constraints:
- Number of dimensions restricted to
- The room must be a unit square
- Emitter and receiver are coincident to the origin
- Each lattice point contributes only one unit to the summation (they are unweighted)
- Area is a quadratic function of

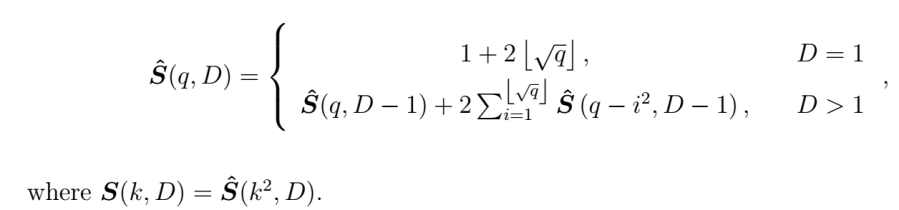
Let us generalize the Gauss circle problem so that these constraints can be either removed or relaxed. For reference, Euclidean or 

- Recurrence relation for lattice volume
in arbitrary dimensions:

The base case forassumes that positive and negative lattice points coordinates are symmetric. For higher dimensional cases, we do a form of recursive integration over the positive integers of each dimension (see animation below).

Purple region represents lattice volume at in
increases in
.
This proof follows from the observation that if
and
, then
.
- Memorization in quadratic space:
Lower dimensional solutions of the original recursive formulation can be stored in memory by mapping integer space. i.e. We compute and store
for
where
- Integer scaling of room boundaries and receiver offset:

where integer scalardetermines the size of room along dimension
is the emitter offset in dimension
implies
and
.
- Exponential decaying lattice point contributions:
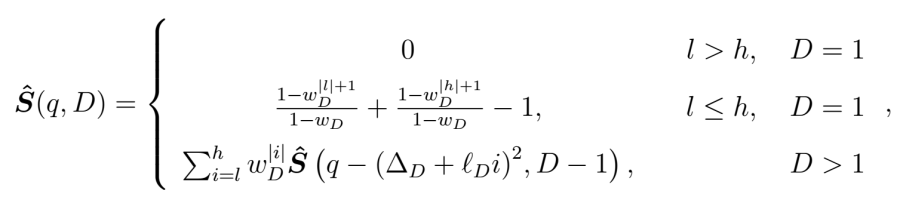
whereis a real value representing in physical terms a conversion of dB loss to magnitude due to a reflection off a boundary. Proof of the case of
follows the application of the geometric series.
With the generalization of the Gauss circle problem into a dynamic programming problem, we have expanded the parameter space to include arbitrary dimensional orthotopes of integer boundary sizes, integer receiver offsets, and real reflection gain/loss coefficients. Prefiguring these parameters beforehand and accounting for attenuation loss due to a generalization of the inverse square law of sound-fields into higher dimensions, an RT60 or FIR length and subsequent max meters
The cost of directly computing 







———-
Notes: Equations were lifted from a draft paper that I’m writing. Animations were done with GeoGebra.

[…] in the previous post our derivation of the Gauss circle recurrence relation generalized to arbitrary […]
LikeLike
[…] produces a density estimation which forgoes processing individual image-sources. See post. Related: Gauss Circle problem, dynamic programming, and Fourier […]
LikeLike
[…] we can compare the lattice volumes bounded under larger p-norms such as or Euclidean (see post on Gauss circle problem, volume appx. hypersphere) and the norm given by (lattice volume […]
LikeLike
[…] direct computation in these spaces is expensive but some clever maths [see tutorial (parts 1, 2, 3, 4)] reduced the asymptotic costs to the point of practical use (e.g. a Reverb plugin). […]
LikeLike